FEATURED · Quantum decision systems
July 12, 202614 min read
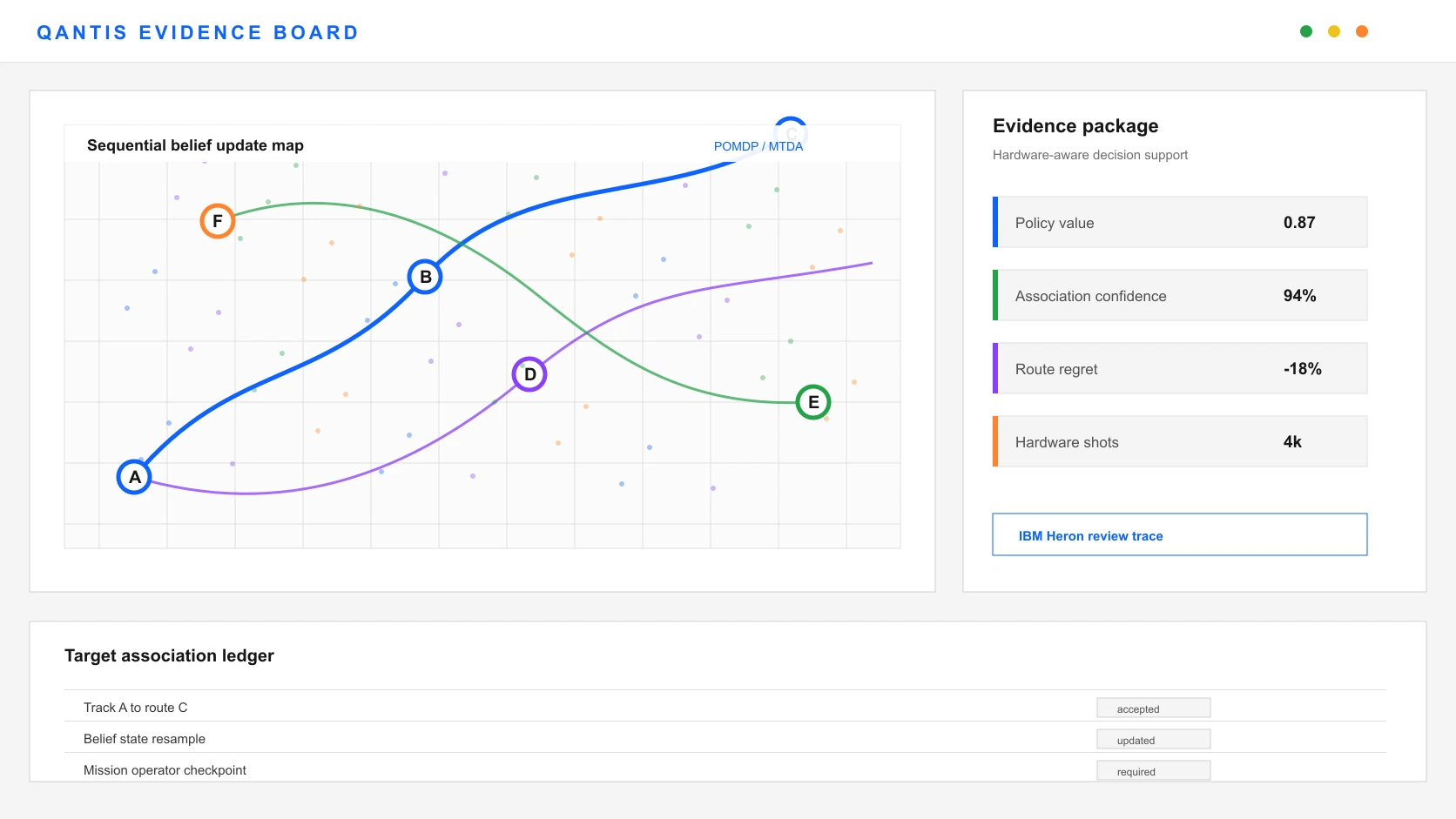
QANTIS as a calibrated belief-update service.
The new QANTIS paper narrows the quantum role to one auditable contract: estimate rare-observation evidence on IBM Heron, convert it into an ordinary posterior, and return that posterior to a classical planner.
QANTISPOMDPbelief updateIBM Heronquantum inferenceclassical planning